Robots inspirados en escarabajos para realizar tareas en espacios reducidos
Para su realización utilizaron diminutos activadores en espiral que tiran de un mecanismo en forma de viga.
El profesor de ciencias mecánicas e ingeniería Sameh Tawfick ha dirigido un estudio en el que se presentan robots del tamaño de un escarabajo. Crédito: Michael Vincent. Imagen facilitada por la Universidad de Illinois en Urbana-Champaign.
Hay escarabajos que son capaces de saltar más de diez veces la longitud de su cuerpo. Ahora, un equipo científico ha logrado diseñar robots saltarines del tamaño de este insecto que pueden realizar tareas en espacios reducidos, los cuales a menudo se encuentran en entornos mecánicos, agrícolas y de rescate.

Los robots, diseñados por ingenieros de la Universidad de Illinois en Urbana-Champaign (Estados Unidos), son lo bastante potentes para maniobrar sobre obstáculos y lo bastante rápidos para igualar el rápido tiempo de escape de un insecto.
Su descripción se publica en la revista Proceedings of the National Academy of Sciences (PNAS) y, según sus responsables, se trata de un "paso significativo" en el desarrollo de robots saltadores.
Los investigadores, en colaboración con científicos de la Universidad de Princeton, han estudiado durante la última década la anatomía, la mecánica y la evolución de los elatéridos (conocidos por muchos nombres, entre ellos escarabajos "clic" o "chasqueadores").
En un estudio de 2020 se descubrió que un músculo enrollado en el tórax de estos insectos desencadena una contracción brusca (liberación rápida de energía elástica) que les permite impulsarse en el aire varias veces la longitud de su cuerpo para enderezarse si caen de espaldas.

"Uno de los grandes retos de la robótica a pequeña escala es encontrar un diseño que sea pequeño pero lo bastante potente para sortear obstáculos o escapar rápidamente de entornos peligrosos", explica Sameh Tawfick.
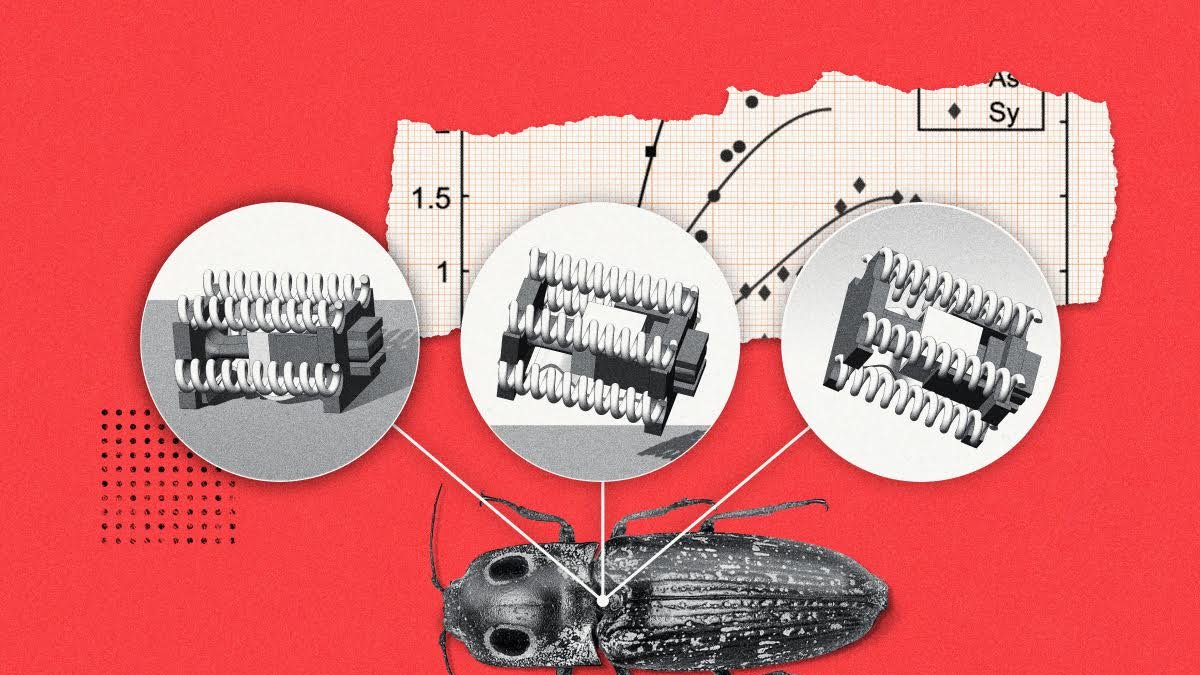
En el nuevo estudio, Tawfick y su equipo utilizaron diminutos activadores en espiral -análogos a los músculos de los animales- que tiran de un mecanismo en forma de viga, haciendo que se doble lentamente y almacene energía elástica hasta que se libera espontáneamente y se amplifica, impulsando a los robots hacia arriba.
Este proceso es sencillo en comparación con la anatomía de un escarabajo, detalla Tawfick; "sin embargo, lo simple es bueno en este caso porque nos permite trabajar y fabricar piezas a esta pequeña escala".
Guiado por la evolución biológica y los modelos matemáticos, el equipo construyó y probó cuatro variaciones del dispositivo, fijándose en dos configuraciones que pueden saltar con éxito sin intervención manual.
"De cara al futuro, no tenemos un planteamiento fijo sobre el diseño exacto de la próxima generación de estos robots, pero este estudio planta una semilla en la evolución de esta tecnología", afirma Tawfick.
El equipo imagina estos robots accediendo a espacios reducidos para ayudar a realizar tareas de mantenimiento en grandes máquinas como turbinas y motores a reacción, tomando fotografías, por ejemplo, para identificar problemas.
"También imaginamos robots a escala de insecto útiles en la agricultura moderna", explica Tawfick.
En la actualidad, añade, científicos y agricultores utilizan drones y vehículos exploradores para supervisar los cultivos, pero a veces necesitan un sensor para tocar una planta o tomar una fotografía de un elemento a muy pequeña escala. "Los robots a escala de insecto pueden hacer eso".
En la investigación también ha participado la Universidad de Birmingham, la de Oxford y la de Texas.
Más historias





Más visto
